ISS_SLAM_TUTORIAL
ISS_SLAM_TUTORIAL
Quick Start
Mapping
- Connect to ISS self-driving car through ssh using vscode
Step1:
Create a new terminal(ctrl+alt+t), then typecode .Step2:
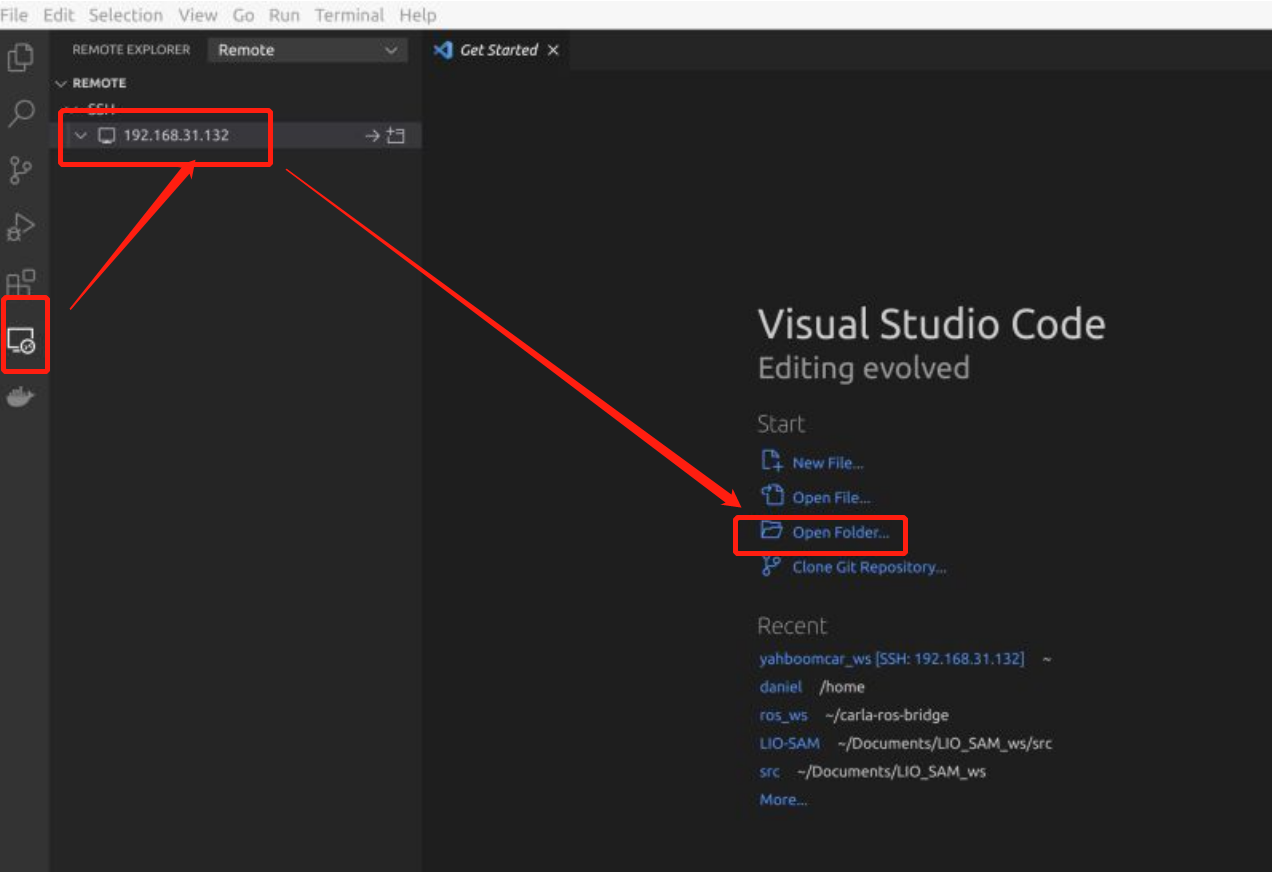
- Open Remote Explorer
- Open new folder
- Choice yahboom_ws
- Create a new terminal in vscode through
roslaunch yahboomcar_nav 3d_laser_astrapro_bringup_and_slam.launch - Wait 15s
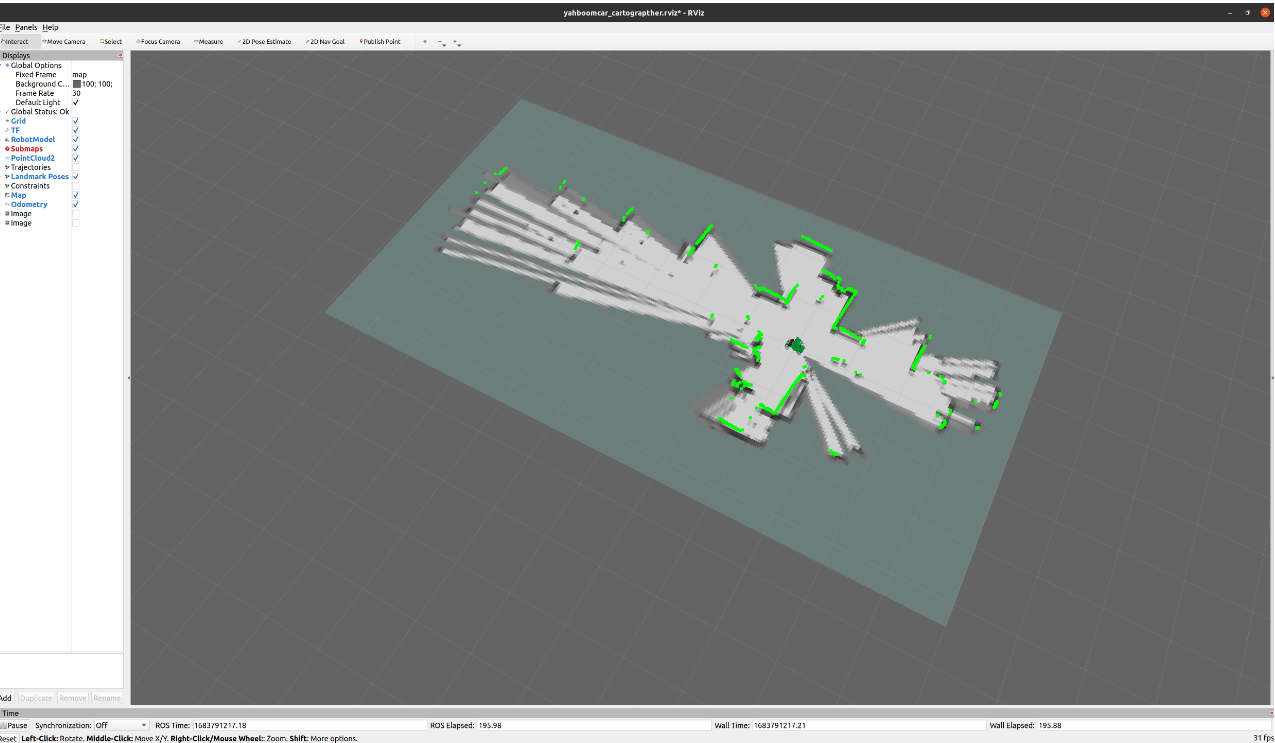
- Display rviz on the local terminal
step1:
- Create a new terminal(ctrl+shift+`)in vscode
step2:
cd Documents/yahboomcar_wssource devel/setup.bashroslaunch yahboomcar_nav view_cartographer.launch
step3:
Mapping with the remote
———shut down all terminal———
Navigation
- Connect to ISS self-driving car through ssh using vscode
Step1:
Create a new terminal(ctrl+alt+t), then typecode .Step2:
- Open Remote Explorer
- Open new folder
- Choice yahboom_ws
- Create a new terminal in vscode through
roslaunch yahboomcar_nav 3d_laser_astrapro_bringup_and_navigation.launch - Wait 15s
- Display rviz on the local terminal
- step1:
- Create a new terminal(ctrl+shift+`)in vscode
- step2:
cd Documents/yahboomcar_wssource devel/setup.bashroslaunch yahboomcar_nav view_cartographer.launch
ISS_SLAM_TUTORIAL
http://example.com/2023/10/09/ISS_SLAM_TUTORIAL/